Student Projects
Supporter State Estimation System
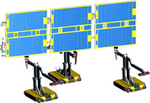
Implementation of a localization and state estimation system for a special ground robot using IMU and 2D LiDAR. The ground robot is part of a Gravity offload system for testing of spacecraft solar arrays (which are designed for microgravity) on earth.
Keywords
State Estimation Localization
Labels
Semester Project
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-04-25
Applications limited to ETH Zurich
Organization Autonomous Systems Lab
Hosts Ott Lionel , Pantic Michael
Topics Information, Computing and Communication Sciences
Autonomous Mapping for Construction Site Monitoring

Autonomous mapping systems can provide crucial information for construction monitoring and industrial inspection tasks. They aim to repeatedly map known environments with unknown partial modifications without human intervention.
Keywords
Drone, Computer vision, Path Planning, Mapping
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-02-29 , Earliest start: 2024-01-01 , Latest end: 2024-07-01
Organization Autonomous Systems Lab
Hosts Pinto Teixeira Lucas
Topics Information, Computing and Communication Sciences , Engineering and Technology
Versatile and Robust Multi-Robot SLAM

Recent work on multi-robot systems with collaborative autonomy has made significant strides towards developing robotic teams capable of performing complex tasks in real, complex settings as shown above. Right at the core of such capabilities is the capability to collaboratively perform SLAM (Simultaneous Localization And Mapping) within such multi-agent systems that can operate efficiently and in challenging real-world environments, which is the main goal of this project. The aim of this project is to develop key components of a multi-robot SLAM system that is robust in challenging environments and adaptable to different scenarios, ranging from environmental monitoring to search-and-rescue operations. The envisioned system will research integrating complementary onboard sensor modalities (e.g., cameras, LiDAR, and IMU), machine learning methods, and distributed communication systems to provide precise localization and mapping exhibiting resilience to sensor failure and sufficient efficiency to be deployed onboard small platforms, such as drones. The student will be guided to work towards a system architecture that can enable effective testing and optimization in state-of-the-art simulation engines, with the ultimate goal of reducing the gap between simulated experiments and real tests. The outlook is to create a system that can be employed onboard a small swarm of drones in a real setting.
Labels
Master Thesis
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2024-02-01 , Latest end: 2024-10-01
Organization Autonomous Systems Lab
Hosts Pinto Teixeira Lucas
Topics Information, Computing and Communication Sciences
Aerial Autonomy in Challenging Dynamic Environments

Automating drone navigation promises to revolutionise the way we conduct a wide variety of tasks, such as agricultural monitoring, industrial inspection, and disaster relief scenarios. Equipping a drone with the capability to autonomously explore and map previously unseen environments using onboard sensors and algorithms forms the basis of autonomy. While there has been tremendous progress in this area over the past few years [1-5], existing systems still lack reliability and adaptability to the challenges and complexity of real settings, which is crucial for the deployment of this technology in actual missions. In particular, performing robust navigation and mapping in highly dynamic environments (e.g., forests) remains an open challenge. Following promising leads from the state-of-the-art and our in-house navigation stack, the goal of this project is to develop the capability to deal with increasingly dynamic and complex scenarios. The student will be guided towards leveraging the multi-sensor capabilities of a LiDAR-Visual-Inertial payload being developed in the lab to research approaches for perception and mission planning that can fuse information from the different sensors and capture high-fidelity representations of challenging dynamic environments. Initially, the student will work within a realistic simulation environment and then deploy and test their work onboard a real drone in a real setting.
Labels
Master Thesis
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2024-02-20 , Latest end: 2024-12-05
Organization Autonomous Systems Lab
Hosts Pinto Teixeira Lucas
Topics Information, Computing and Communication Sciences
Long-Term Aerial Localization in Agricultural Environment
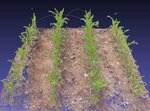
Digital environments, or digital twins, allow for design, prototyping, and testing in the virtual world before moving to the real world, thus accelerating development and reducing costs. A digital twin of a farm supports crop operations such as scheduling a harvest or predicting a yield, while agritech companies can develop farm automation robots using a digital twin. The goal of this project is to develop 3D Reconstruction and localization strategies that are capable to identify temporal invariant areas and properties in crop environments during the production season. The main target is to be able to match the same plants over time.
Keywords
3d Reconstruction, Place Recognition, Aerial Vehicles, Deep Learning, Computer Vision.
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-02 , Earliest start: 2023-07-23 , Latest end: 2023-08-31
Organization Autonomous Systems Lab
Hosts Pinto Teixeira Lucas
Topics Information, Computing and Communication Sciences
Semantic Segmentation-Aided Bundle Adjustment

Bundle Adjustment (BA) is a critical optimization technique used to refine a visual reconstruction by jointly estimating the 3D scene structure and the viewing parameters. Traditional BA approaches primarily focus on geometric features and might struggle in highly unstructured scenarios, such as natural environments. This project aims to extend the Bundle Adjustment methodology by incorporating higher-level features extracted from semantic segmentation. The integration of semantic information aims to provide contextually relevant and more discriminative data to the adjustment process, thereby improving its accuracy and robustness.
Labels
Semester Project , Master Thesis
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-02 , Earliest start: 2023-07-30 , Latest end: 2024-05-01
Organization Autonomous Systems Lab
Hosts Pinto Teixeira Lucas , Mascaro Rubén
Topics Information, Computing and Communication Sciences
Label transfer from satellite to aerial imagery

The project aims to implement a semantic label transfer from satellite to aerial imagery in order to enable the training of image-based machine learning algorithms for autonomous aerial vehicle tasks, such as path planning, collision avoidance, and localization.
Keywords
semantic scene information, dataset generation, air-satellite semantic label transfer, vision-based deep learning, computer vision, drone navigation
Labels
Semester Project
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2023-11-30 , Earliest start: 2023-03-23 , Latest end: 2023-04-30
Organization Autonomous Systems Lab
Hosts Mascaro Rubén , Pinto Teixeira Lucas
Topics Information, Computing and Communication Sciences
Note on plagiarism
We would like to suggest every student, irrespective of the type of project (Bachelor, Semester, Master, ...), to make himself/herself familiar with ETH rules regarding plagiarism